Raising $75000 for the development of a VTOL vehicle (flying car) Proof of Concept & Prototype
Introduction
Since the 1950s, everyone was thinking that the family of the future would be going places using flying cars. Well, here we are in 2022 and still no flying cars. Or so we thought.
There are a number of companies that are in the process of developing Vertical Take Off / Landing (VTOL) vehicles for commercial sale. Some are making use of propellers in the form of over sized drones (for example, take a look at the Jetson One made in Sweden). Others, though, are making use of a new propulsion system with the focus on larger vehicles rather than the personal VTOL like the Jetson One (for example, take a look at the Jetoptra manufactured in Edmonds, Washington).
In all cases, these companies have pre-sold vehicles and make use of the sales to both manufacture the vehicles or to continue development of the VTOL. Jetson has been selling their VTOL for 3 years at 50 units a year, have sold out 2022 and 2023 and are now selling units for 2024. Their sales price of U$70,000 (originally $92000) with a down payment of U$22000. Jetoptra have received awards from the US Government to provide vehicles (pricing hasn't be disclosed).
VTOL vehicles are here and it's just just a matter of commercializing them. And that is what this project is intended to do - take the designs developed from numerous findings in university research papers and create a Proof of Concept of the propulsion system and then a working Prototype.
Vision
When I first heard about the Jetson One, I had visions of purchasing one but then I looked at the specifications and realized that it wouldn't be able to carry me. I'm 6'7", 270 lbs but the maximum payload for the Jetson One is 200 lbs. But I really wanted one so I decided to design and build one. While I was doing the research into mirroring the Jetson One design making use of propellers, I came across a video of a young man that had made a 'bladeless' drone and realized that there was a simplier, safer, more efficient way of creating a VTOL vehicle. That changed my direction of thinking.
While researching bladeless technologies, I started finding more and more university research papers (for example, see "Development of a Bladeless Thruster for UAV Application" in the Journal of Emerging Technologies) that provided guidance in the design of the thruster. This provided me with the information that I needed to design the Propulsion system.
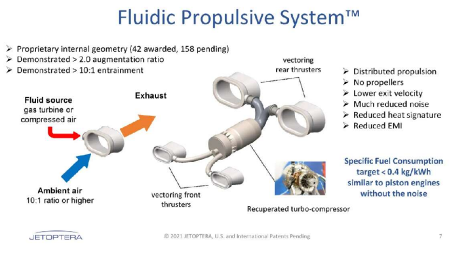
Keeping an eye on what other companies are doing is important. So, once I created the design, I went back and looked at the Jetoptra and discovered that, while I worked independent of the Jetoptra direction, we were both making use of the same approach - a 'Dyson Fan' type propulsion system.
Fig. 1 - Jetoptra Propulsion System (public)
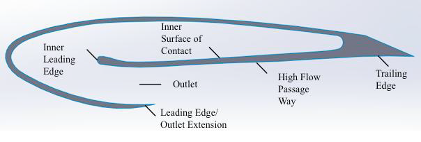
The 'Dyson Fan' (specified moving forward as 'Dyson') design make use of 3 different forces to provide thrust with the resulting air flow being 15x the amount that the compressor itself would provide. This makes use of pressure differentials (low pressure areas pull air) and results in air flows that allow for a thrust. The end result is a Propulsion system that provides the appropriate thrust, is safer because of a lack of propellers which could damage / injure people and the surrounding environment, and much quieter (which results in a more efficient solution). The resulting designs focused on the Dyson approach has an Outlet that makes use of the following type of cross section:
Fig. 2 - Cross section of Dyson Design (Research Papers)
There are specific changes to the example Dyson Outlet above, both with the cross section and how the air flow actually gets into the Outlet. But when simulations of the design are done, the air flow acts as expected. So now it's about creating a physical version of the design.
VTOL Design Requirements
For a design to be successful, it's essential to have requirements document prior to the beginning of design so that you know what you are designing against. If additional requirements come up, then the best way to deal with those requirements is to put them in a later phase. The following are high level requirements that this project is attempting to meet:
be able to handle payload weight of 350 lbs or more (includes pilot weight)
be able to handle my size (6'7") while sitting with knees bent
have a total machine weight of 250 lbs or less (without payload)
have a total maximum weight, with payload, of 600 lbs (205 Kg) (2001 N)
be able to have a flight time of 2 hours
be able to recharge in less than 8 hours
be fully enclosed from the elements
have a safety measure to ensure safety of the pilot
be able to fly a single person
cost is less than $10K to build
85% of all parts are standard COTS parts
be able to handle Vancouver weather
handle temperatures from -10*C to 40*C
have a top speed of 60 Km/hr
meet regulations for flight (ultralight)
meet regulations for flight (heavier than ultralight)
meet regulations for large battery packs
Nice to have requirements (items that aren't mandatory to be met) are as follows:
able to use TESLA charging station in public locations
have storage space for non-pilot payload
have adjustable seating for the pilot
have 1 hand free while flying
consistent, repeatable process for parts
The Resulting Propulsion Design
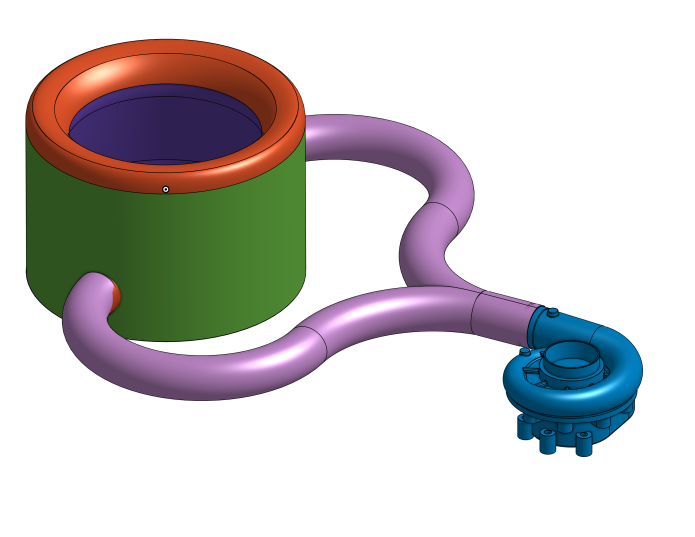
With these requirements, the following design was put together. First, the propulsion system. This system is composed of 3 parts; the Outlet, the air flow tubes, and the compressor. The final solution looks as follows:
Fig. 3 - Original VTOL Propulsion drive design
The compressor (color coded in blue) is an off the shelf compressor that is used in automotive situations (see the budgeting spreadsheet). This design requires a build up of around 4 PSI within the Outlet body. The tubes connecting the compressor to the Outlet body (color coded purple) are split to allow for equal amounts of air coming from the compressor and curved to minimize air pressure build up as they move the air flow from the compressor to the Outlet body. The Outlet body is the true design for the propulsion system. They make use of a cross section that mimics the Dyson design structure.
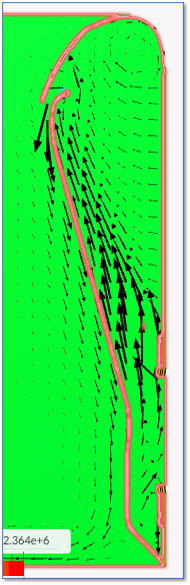
The actual dimensions for the cross section won't be added to this document due to information control but this design was run through SimScale, a web based application that allows for the Computational Fluid Dynamics (CFD) simulation of fluids, in this case, air. The end result was that the air flow acted as expected:
Fig. 4 - Flow Analysis
What you'll see is that the air flow enters the cross section, flows up to the top and out the ejection gap. The air then follows along the exterior surface of the cross section just as it does in a Dyson fan solution (this is called the Colanda Effect). By traveling along the surface, it creates a low pressure situation in the middle of the Outlet body, thus pulling air from the surrounding environment and allowing for a 15x increase of the air flow from what the compressor provides. The faster the air flow from the compressor, the higher the air flow through the Outlet body. This will provide the thrust for the propulsion system.
Calculations indicate that, for hover to occur, there needs to be a pressure of around 3.9 PSI within the Outlet body. Compressors used for automotive purposes (ie. SuperChargers) can easily provide over to 21 PSI, thus allowing for additional air flow for allow for lift above hover pressure. The two inputs are connected to the Outlet body to also allow for even distribution of the air flow out of the Outlet body (research papers have shown that there are inefficiencies occurring if only one source of air flow into the Outlet body so a second input area opposite to the first input area deals with this. You'll also notice that the inputs are lower down in the body of the Outlet. This also was found from the research paper analysis.
This Propulsion system is the focus of the Proof of Concept (PoC) activities. Adjustments to the Outlet body cross section are where the changes are expected to be needed. Once the Proof of Concept is working as expected, it will be time to move on to the creation of the Prototype.
Overarching Prototype Design
Many of the requirements listed above are met with the overarching Prototype Design. Typically, designs at this time are logical in nature to ensure that requirements are met prior to actual physical designs being put into place. The following diagram indicates that the Prototype will consist of:
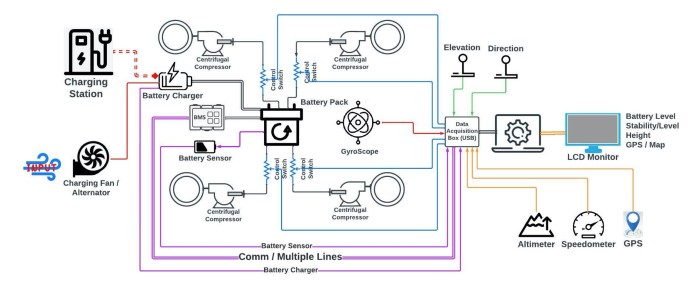
Fig. 5 - Logical Architecture of the Prototype
What you will see in the logical architecture for the Prototype are the following components:
Compressor / Outlet combination - This is the result from the Proof of Concept. There are 4 in total in the Prototype and will be placed at the 4 corners (think location of wheels on a car). There is redundancy built into this design where, if one propulsion unit goes unavailable, there are still 3 propulsion units that can allow for the VTOL vehicle to land safely.
Battery Packs - The battery packs will provide power to the compressors. A decision is to be made as to whether there will be one or two stand alone battery pack. The decision is leaning towards 2 separate battery packs for redundancies (supporting diagonally opposite Compressor/Outlet combinations.
Battery Management System (BMS) - the original prototype will have a BMS built into the battery pack. For manufacturing, the BMS will be built in-house or separated from the battery cells in order to lower costs.
Battery Charger - The requirement is to be able to charge at a public charging station and that will require the use of a J1227 standard interface as well as an onboard battery charging unit.
Charging Fan / Alternator - as the vehicle moves through the air, there is an opportunity to convert the air flow moving over the front of the vehicle into an electric charge for recharging batteries. This will be added at a later phase but will take the form of a Squirrel Cage linear fan that will spin as air flows over it. This will allow for increase time between charges of the batteries. Because it's not tied to the propulsion system, it is a separate system and can provide a charging effect.
Data Acquisition Board - The data acquisition board is used for taking in the signals from the BMS, controllers (elevation and direction) as well as the measurement devices and provide output control signals to the motors connected to the compressors. This will be a National Instruments Data I/O board and, for the prototype, focus just on the control functionality. It will be a stand alone USB connected device that will need connection to a ruggedized computer.
Onboard Computer - The VTOL vehicle will have a ruggedized computer for management of the Data Acquisition board and for presentation layer information to a LCD monitor for Pilot interface. The software for controlling the Data Acquisition board will be installed (National Instruments LabView software) and will make use of a Windows OS. The software will also be used to limit speed and heights of the vehicle.
Elevation and Direction Controllers - there will be 2 controllers for controlling the vehicle, a uni-direction controller for elevation and a bi-direction controller for directional control. These controllers may be combined into a single controller at a later phase in order to meet the requirement of having 1 hand free.
Gyroscope - In order to make controlling the vehicle as easy as possible for the general public, a 'self leveling' control will be needed. The self-leveling capability will be provided by a Gyroscopic component (Digital Ring Laser Gyroscope from Honeywell) and will allow for a much easier flight capability for an inexperience driver. This component won't be needed for the prototype but will be in the first production vehicle.
Budget
The Budget spreadsheet is available on demand. A short summary is that the following are the expected costs associated with the PoC and the Prototype:
Proof of Concept - the expected costs associated the components of the Proof of Concept are $12670 with a buffer for 5 versions of the Outlet body design. The designs will have the 3D printing outsourced to reduce the need for any manufacturing capital expenses.
Prototype - the expected costs associated with the Prototype are $30000 which includes a buffer for $5000 for unexpected costs. Each component has a small buffer in case of underestimated pricing.
Labour - Labour is expected to cost roughly $17200. This is for 1 person for a month worth of work (non-continuous).
These costs are broken out into the specific components and are available by spreadsheet for you to go over.
Schedule
The schedule of the Proof of Concept (PoC) is focused on being complete by mid-January 2023 with the goal of having a proven working propulsion system in place. The designs have been created and quotations for initial 3D printing of the components have been received.
The schedule for the Prototype is dependent on the PoC but is planned to be complete by mid-March 2023. Specific components for the Prototype have been identified and costs have been obtained and just wait for a PoC to be tested and completed.
Design Phase of the project has been pretty much completed and now we are entering the Build phase where the PoC and Prototypes will be created.
NOTE1: The purpose of the Prototype is ONLY to prove that a flying vehicle capable of carrying a person has been designed and proven. It will not include an enclosed body and completed User Experience internally. Those will be included in the first manufactured vehicle (not part of this project but planned for being available by mid-August 2023).
NOTE2: The flight test of the Prototype will be highly publicized with the secondary goal of generating interest from the general public to generate pre-sales. This approach was done by for the Jetson One and allowed for sales to begin prior to manufacturing was ready.
Who is Neil Rerup?
It's important for you to know who I am. My name is Neil Rerup and I've been in the Technology industry since 1988. My original degree from 1985 was in Robotics and Automation from BCIT but there weren't many jobs in Robotics in BC at the time so I moved into Thick Film Hybrids. Over the 1990s, I worked as a Technical Sales Engineer and worked with designing in Data Acquisition Boards, electronic components, and such. All technologies that are being used in the creation of this project. But in 1991, I was introduced into the world of IT before there were even proper networks and the Internet (my first network technology was FDDI, a dual fiber optic ring topology). I literally grew up in the IT industry.
By the year 2000, I realized that I wanted to shift back into design work and not be in the pre-Sales side. I approached a company called EDS (the worlds largest Outsourcer at the time and second largest IT company behind IBM) about joining them as a Senior Network Analyst. One of the lines in my job description was 'and responsible for security'. It's important to understand that, at the time in 2001, cyber security was just starting. So when I was approached about reviewing the security designs for a forest company, I said sure.
Now, about that time, EDS had a CEO by the name of Dick Brown. Dick had a habit of writing emails to the company about various teams and how well they were doing. Well, when I was asked to review the cyber security designs for that forestry company, Dick sent an email doing the 'this team is doing really well here'. I couldn't find how EDS was doing cyber security design reviews so I responded to the CEO of a Fortune 100 company, thanked him for the email, and asked if he knew where I could find out more about cyber security.
What I didn't expect was that Dick would forward the email to the VP that had just set up a Cyber Security team in Hearndon, Virginia to support the CIA, NSA, etc. That VP flew up to Vancouver to meet with me, and I became the first employee in Canada to work on Cyber Security.
As a result, I have worked on multiple large design projects including the bond selling from the Bank of Canada, the first Web Portal with the City of Calgary, and a redesign of GM Defence's infrastructure. I was one of the very first Security Architects in the world and am one of the best that there is.
My career has led me to be the Security Architect for the Vancouver 2010 Winter Olympics (large project skills), BC Hydro's Smart Meter initiative (OT Skills for 1.8 Million meters), design and implementation of a Federation solution for General Motors (dealing with cutting edge technologies), and the creation of a reference architecture for all the financial applications including SWIFT for the Bank of Canada's wholly owned subsidiary (dealing with high risk projects), Payments Canada.
I've written books on Security Architecture (Hands-On Cybersecurity for Architects: Plan and design robust security architectures), worked with NIST in the creation of reference architectures for Utilities in North America, and have created standards with IETF. I've always been at the forefront of standards development and technological advances.
I have always been on the leading edge of technology, whether it was IT, Robotics, or Thick Film Hybrids. To me, it's imperative to keep the mind active and moving forward. Transportation is a core industry in all countries and I believe that the use of ground based vehicles is limited in its future (that includes electric vehicles). I believe that VTOL vehicles are revolutionary and I am making use of all my design and technical skills to build a commercially viable solution.
This project is all about proving a design correct and taking it the next step towards a working prototype. When the prototype is working, it will usher in a new era of transportation that will free up time to individuals by removing transportation gridlock, reduce impacts to the environment, and transform our thinking of transportation from 2 dimensions to 3 dimensions. Imagine not needing a road system anymore! The cost saving from maintenance of roads will reduce over time. And my technical skills will lead to the successful delivery of a VTOL Vehicle in this project.
This project is not a 'flight of fancy' (sorry for the pun!). There are a number of other companies that are developing in this space, with pros and cons for each. The following are a list of just some of the companies and their associated URLs.
Jetson Aero - makers of the Jetson One, a propeller driven device. Limited to 200 lbs payload and a flight time of 30 min, they have been selling over 50 units a year for 3 years. They are funding their growth through pre-sales as well as have just completed a $10 Million seed round.
Jetoptera - they are making use of the same concept as this project and have received military contracts this year (2022). They are taking a 'big bang' approach rather incremental improvements. They are collaborating with Honeywell to sell into the Military market. Jetoptera has multiple rounds of multi-million dollar financing from Venture Capital.
SkyDrive - SkyDrive has partnered with Suzuki and have created a propeller driven solution. Flight times are limited to 30 minutes. SkyDrive is a Japanese company with numerous institutional investors including Suzuki, Nippon, and others.
JetX - JetX has created a scaled down version of a commercial vehicle using a propulsion system more like a scaled down jet engine.
Lilium - Lillium is using jet engine technology but with engines that can swivel. They make use of Ducted Electric Vectored Thrust, a fancy term for small pivoting jet engines. They are currently trading on the NASDAQ under the code LILM.
There were 12 companies granted funding from NASA to develop VTOL devices. These are just 5 of the more well developed versions.
University Research Papers
The following were some of the research papers that the design was pulled from. They are provided to validate the approach and design of the VTOL vehicle:
Improving Safety: Design and Development of a Bladelss Thruster for Autonomous Multicopter - D. Valdenegro, A. Capunay, D. Gonzalez, L. Carrilo, P. Rangel, International Conference on Unmanned Aircraft Systems , 2018
Design, Development and Analysis of Bladeless Thruster - M.A. Anutha, R. Aparna, A. Dsouza, S. Kumar, G. Tejaswini, International Journal of Electrical, Electronics, and Data Communication, June 2020
Development of Bladeless Thruster for an UAV Application, M.A.Anutha, A. Dsouza, S. Kumar, G. Tejaswini, Journal of Emerging Technologies and Innovative Research, May 2020
Influence of Geometric Parameters on the Average Outlet Velocity of the Bladeless Fan, D. Akgol, S. Yavuz, European Journal of Science and Technology, November 2021
An Overview of Bladeless Drone, S. Sivaraman, V. Saravana, S. Rajalakshmi, M. Santhini, S. Sittheshwaran, International Journal of Innovative Research in Electrical, Electronics, Instrumentation, and Control Engineering, October 2021
Analysis and Design of single-stage, two-mode AC/DC converters for on-board battery charging applications, J. Venkata, S. Williamson, IET Power Electronics, December 2019
An Aeroacoustic Comparison of Centrifugal Fans with Backward-curved and Airfoil Blades, S. Moon, N. Cho, Inter Noise 2019
US Patent Application Publication "Fluidic Propulsive System", Applicant: Jetoptera, Ltd., Inventor: Andrei Evulet, Mar 2, 2017